 2024-02-27
2024-02-27Go-map的底层原理
1. 整体流程
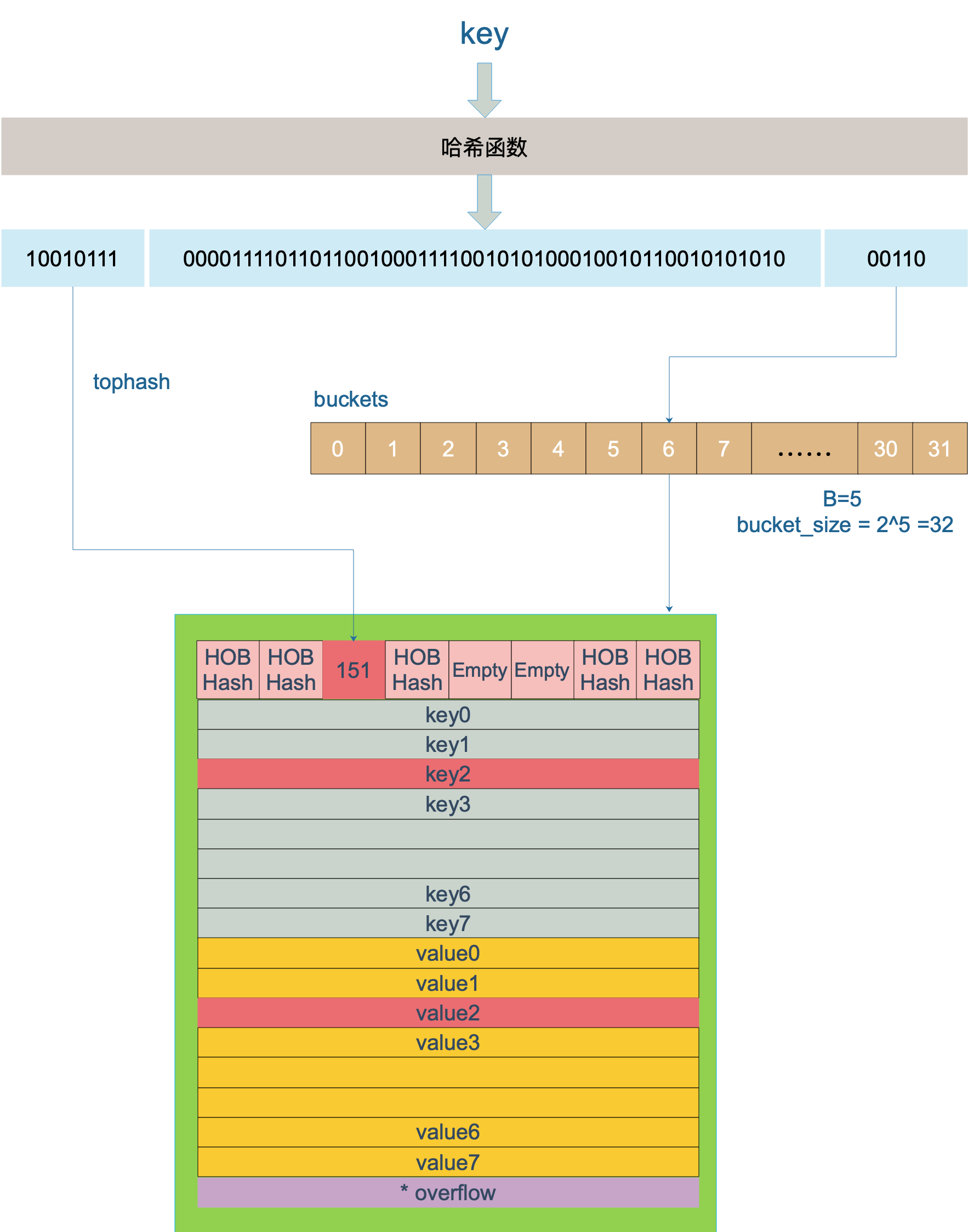
- 通过哈希函数,将
key散列化,得到一个64位的哈希值,这个哈希值决定了两点:value会落到那个“区间”当中。- 在该区间当中,
value具体在哪个位置上。
- 在
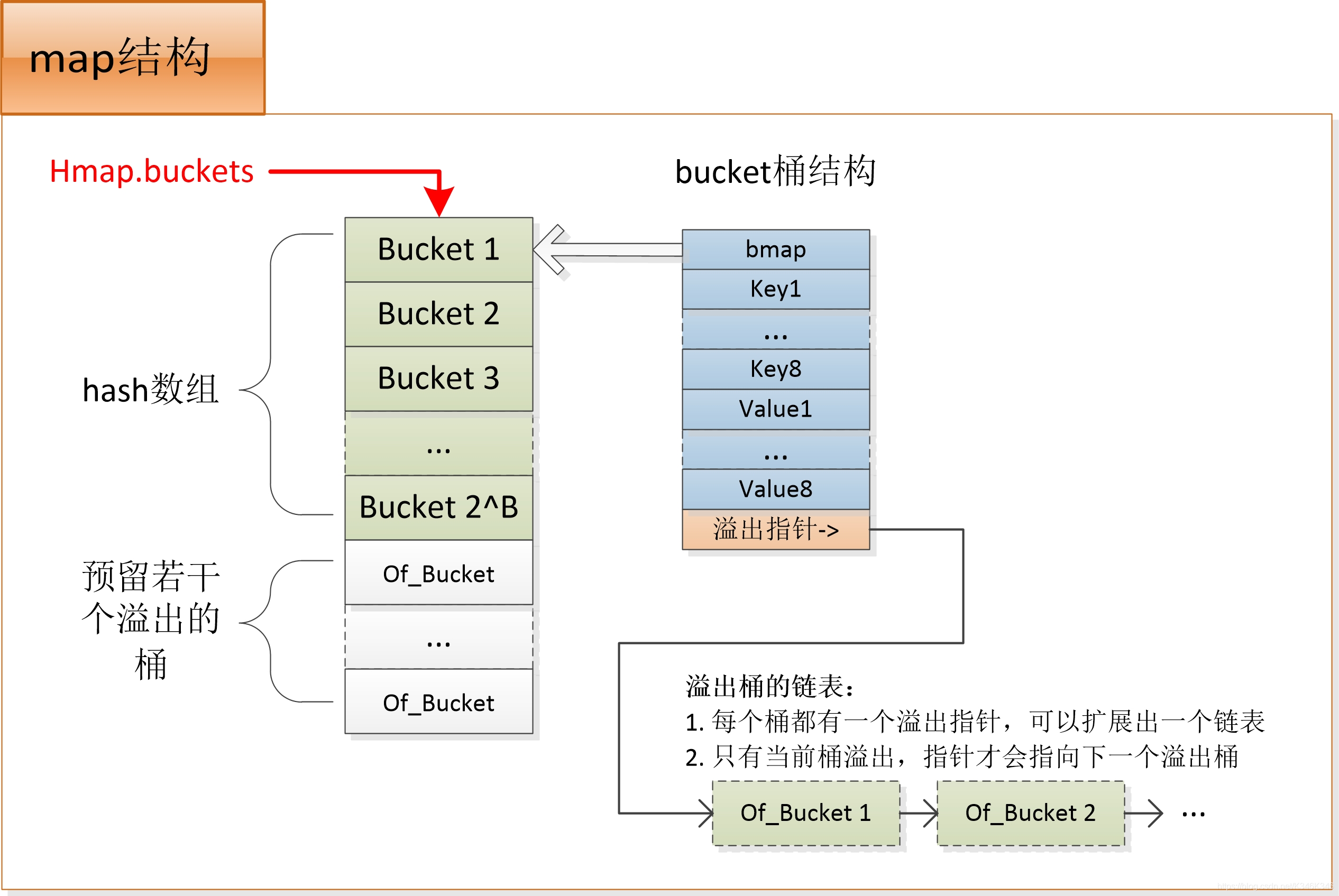
Go的设计当中,这个所谓的区间,称为桶bucket,桶通过名为hmap的结构体进行组织
Go当中的map是一个指针,占用8个字节,指向hmap结构体
go
// A header for a Go map.
type hmap struct {
// 元素个数,调用 len(map) 时,直接返回此值
count int
flags uint8
// buckets 的对数 log_2
B uint8
// overflow 的 bucket 近似数
noverflow uint16
// 计算 key 的哈希的时候会传入哈希函数
hash0 uint32
// 指向 buckets 数组,大小为 2^B
// 如果元素个数为0,就为 nil
buckets unsafe.Pointer
// 等量扩容的时候,buckets 长度和 oldbuckets 相等
// 双倍扩容的时候,buckets 长度会是 oldbuckets 的两倍
oldbuckets unsafe.Pointer
// 指示扩容进度,小于此地址的 buckets 迁移完成
nevacuate uintptr
extra *mapextra // optional fields
}- 每个
hmap结构体都会指向底层的bmap结构体,也就是上文所说的 桶。 - 具体是如何找到
hmap的呢?哈希值的低B位,决定了会落到那个桶当中。
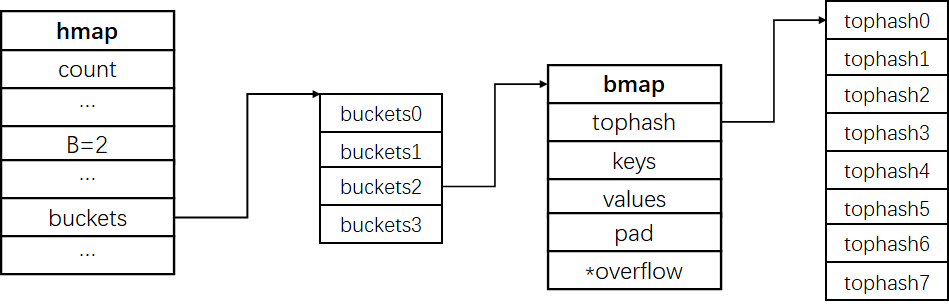
Map 底层是由hmap和bmap两个结构体实现的。
go
// A header for a Go map.
type hmap struct {
// 元素个数,调用 len(map) 时,直接返回此值
count int
flags uint8
// buckets 的对数 log_2
B uint8
// overflow 的 bucket 近似数
noverflow uint16
// 计算 key 的哈希的时候会传入哈希函数
hash0 uint32
// 指向 buckets 数组,大小为 2^B
// 如果元素个数为0,就为 nil
buckets unsafe.Pointer
// 扩容的时候,buckets 长度会是 oldbuckets 的两倍
oldbuckets unsafe.Pointer
// 指示扩容进度,小于此地址的 buckets 迁移完成
nevacuate uintptr
extra *mapextra // optional fields
}- 其中,B是buckets数组的长度的对数,也就是说buckets数组的长度就是2^B。buckets里面存储了 key 和 value,后面会再讲。buckets指向bmap结构体:
go
type bmap struct {
tophash [bucketCnt]uint8
}
type bmap struct {
topbits [8]uint8
keys [8]keytype
values [8]valuetype
pad uintptr
overflow uintptr
}- bmap被称之为“桶”。一个桶里面会最多装 8 个 key,key 经过哈希计算后,哈希结果是“一类”的将会落入到同一个桶中。在桶内,会根据key计算出来的hash值的高 8 位来决定key到底落入桶内的哪个位置。
- 注:一个桶内最多有8个位置。 这也是为什么map无法使用cap()来求容量的关键原因:map的容量是编译器进行计算后得出的一个结果,由于桶的存在,map在内存中实际存放的大小不一定同make出来后的map的大小一致。
- 有一点需要注意:当map的key和value都不是指针,并且size都小于 128 字节的情况下,会把 bmap标记为不含指针,这样可以避免gc时扫描整个hmap。尽管如此,但如图所示,bmap是有一个overflow的字段,该字段是指针类型,这就破坏了bmap不含指针的设想,这时会把overflow移动到extra字段来。
bmp也就是bucket,由初始化的结构体可知,里面最多存8个key,每个key落在桶的位置有hash出来的结果的高8位决定。
其中tophash是一个长度为8的整型数组,Hash值相同的键存入当前bucket时会将Hash值的高位存储在该数组中,以便后续匹配。
整体图如下
Go map 底层实现方式是 Hash 表(C++ map 基于红黑树实现,而 C++ 11 新增的 unordered_map 则与 Go map 类似,都是基于 Hash 表实现)。Go map 的数据被置入一个由桶组成的有序数组中,每个桶最多可以存放 8 个 key/value 对。key 的 Hash 值低位用于在该数组中定位到桶,而高 8 位则用于在桶中区分 key/value 对。